Introduction to Quadcopter Drone
簡介無人機產業, 無人機應用, 無人機種類, 飛行原理, 飛行器組成, 電機, 鋰電池, 組裝指南, 飛控板, 飛控軔體 , 飛行模式及飛行功能, 地面控制站 等.
無人機產業
產業應用漸成形 無人機大聯盟促設分級指引
目前無人機應用可分為3大類,即軍事攻擊/供給、商務應用、以及娛樂展演。軍事領域事涉敏感不便多談,商務應用則相當多元,例如橋樑和水庫等設施巡檢、農藥噴灑、偵查搜救、物流補給、國土測繪等,娛樂性的群飛展演也已相當成熟。

台灣無人機大聯盟(Unmanned Aircraft Systems Team of Taiwan; UAS Taiwan)
台灣無人機應用發展協會
無人機應用
無人機投放砲彈
台製無人機現蹤烏克蘭!投「6枚迫擊砲」毀俄軍 傳波蘭採購800架
 波蘭科技媒體《WP tech》則於18日報導稱,橙森國際所出產的800架「Revolver 860」已先出售給波蘭,再由波蘭政府轉手捐給烏克蘭軍隊
波蘭科技媒體《WP tech》則於18日報導稱,橙森國際所出產的800架「Revolver 860」已先出售給波蘭,再由波蘭政府轉手捐給烏克蘭軍隊
無人機群飛展演
無人機群飛展演「重質不求量」 臺灣希望創新強化內容設計 臺灣希望創新公司(Taiwan Drone 100)屢以群飛展演驚艷四座,執行長李志清指出,群飛技術著重精確定位及通訊技術,即時定位誤差可控制在10~15公分之內。2021年團隊在國際群飛競賽「1000架以下」組別奪得首獎。
 臺灣希望創新公司執行長李志清(左)及技術長蔡博智
臺灣希望創新公司執行長李志清(左)及技術長蔡博智
為提升定位精準度,團隊運用的是Real-time Kinematic (RTK)定位系統,每台無人機皆須裝設RTK接收器,地面則設有天線基地台。RTK接收器的成本曾經相當昂貴,一台要價新台幣40萬,不過近期基本款已降到4,000~5,000元左右。
以展演用到的通訊技術而言,基地台得持續上傳修正訊號到每台無人機,才能持續將定位誤差維持在10~15公分左右,資料傳輸則用到4G LTE、5G、或工業級的Wi-Fi系統。同時,無人機也會回傳資料給操控電腦,地面的操控人員須隨時監控飛機的定位、路徑、電量等狀況,若有異常則須讓機台返航或降落。此外,團隊也開發出雲端監控平台,以利即時和遠端監控。
 |
 |
無人機植樹

無人機收水果
無人機物流
中華郵政於尖石鄉試辦遙控無人機物流服務
中華郵政首度使用25公斤以上的無人機於新竹縣尖石鄉進行物流投遞試飛

無人機外送
可省70%外送人力成本 高軟無人送餐10月「上門」
統一集團攜手中光電智能機器人,展開全新的無人機外送模式
 7-Eleven串聯Foodomo外送平台,積極投入兩大無人外送測試計畫。一是攜手工研院,參與AMR無人智慧物流技術送餐服務行列,推動在地首創自主移動機器人直送門口(door to door)的無人外送服務;二是整合集團旗下四大品牌資源,攜手中光電智能機器人,展開全新的無人機外送模式。
7-Eleven串聯Foodomo外送平台,積極投入兩大無人外送測試計畫。一是攜手工研院,參與AMR無人智慧物流技術送餐服務行列,推動在地首創自主移動機器人直送門口(door to door)的無人外送服務;二是整合集團旗下四大品牌資源,攜手中光電智能機器人,展開全新的無人機外送模式。
工研院南分院執行長曹芳海與統一超商協理吳輝振26日在高雄「2022 Meet Greater South亞灣創新×新創大南方」簽署合作備忘錄,雙方瞄準無人送餐市場,運用AMR無人智慧物流技術,打造全台首創可室外、室內配送、自動呼叫並搭乘電梯的無人送餐物流服務。
城市無人機物流
日將開放大城市無人機物流 爭取制定國際標準
 日本從2012年引進美國軍方的的無人機,就開始研究以無人機當基地台的無人機無線通訊網技術,並分配920MHz與169MHz無線電波頻段,供無人機航管控制及影像轉播等用途應用
日本從2012年引進美國軍方的的無人機,就開始研究以無人機當基地台的無人機無線通訊網技術,並分配920MHz與169MHz無線電波頻段,供無人機航管控制及影像轉播等用途應用
據日經報導,2022年6月起,在日本重量超過0.1公斤的無人機,都要申請類似車牌的ID編號,確定無人機使用者身分,防範惡意使用者。
中光電智能機器人
Teledyne FLIR攜手中光電智能機器人 無人機4Q22美國銷售
SIRAS無人機具備IP54防塵防水等級設計、31分鐘飛行時間、前雷達防撞系統,可1分鐘內快速起飛,長距離圖傳雙頻無線電(2.4/5.8 GHz)遙控器,電池熱插拔,可確保任務不中斷,同時為提高數據安全性,操作者不需建立在線帳戶即可立即飛行,圖像可全部儲存在SD卡,提高使用便利性及避免潛在資料外洩等風險功能。

無人機監控水質
環保署推無人機監控水質 更省時、省錢、低污染 2020/10/21

農業無人機
佐翼科技 以航太領域的無人機技術為傳統農工業打穩轉型的第一哩路
農業用智能無人機
 特殊空拍應用專案
特殊空拍應用專案

| 農用植保機 DX10-N1 | 農用植保機 DX20-E1 |
 |
 |
風機檢測
金屬中心無停轉風機之無人機(UAV)巡檢系統 勇奪科技界奧斯卡2020 R&D100大獎
此外該技術具備「高空穩定性」,可於15kg~25kg的荷載下,7級陣風中穩定飛行。同時可於5分鐘以內完成單一風機檢測任務,風機檢測時間縮短,更能有效擴展到大規模巡檢。
全自動風機葉片表面瑕疵檢測

工業巡檢
Flyability ELIOS2 工業巡檢無人機
 Flyability ELIOS 3 無人機-局限空間檢查/數位建模
Flyability ELIOS 3 無人機-局限空間檢查/數位建模

Quadcopter (四軸無人機)
VTOL (Vertical Take-Off and Landing)
機動性高 : 最高時速應該有超過 100 km/hr
- Flying Santa Penta Copter
掌上型/迷你型無人機
 |
 |
Q100 室內穿越機
| Q100室內穿越機四軸機架 | 8520 航模小電機 空心杯 | 室內穿越微型有刷馬達驅動板 |
 |
 |
 |
Q200/250 穿越機


F450空拍機
 |
 |
市售航拍機
無人機功能 :
- 一鍵起飛
- 三面避障
- 前進避障
- 左右避障
- 前置鏡頭,底置鏡頭
- 氣壓定高懸停
- 實時圖傳 (鏡頭影像傳到手機顯示)
- 手勢拍照/錄像
- 軌跡飛行
- 360度翻滾
- 無頭模式 (Headless)
- 一鍵返航
DJI 大疆無人機
- Mavic 3 是 DJI 新一代旗艦航拍無人機,配備 4/3 感光元件的 Hasselblad 相機,成就傳世佳作;支援全向避障,為你帶來暢快的飛行體驗;續航時間長可達 46 分鐘,圖傳距離可達 15 公里。它的每一項提升,都為航拍確立了全新標準。
- DJI AIR 2S 擁有一台強大航拍機所需:1 英吋感光元件、5.4K 影片、大師鏡頭智能拍攝功能、12 公里 1080p 圖傳、四向環境感知和高速飛行主動避障。
- DJI Mini 2 作為 DJI 航拍機入門首選,DJI Mini 2 便攜易用且安全可靠,極致輕巧,性能犀利,可拍攝 4K 影片,實現 4 倍變焦和 10 公里圖傳距離。支援一鍵短片、一鍵全景、相片畫質智慧優化、手機快傳、截選下載等功能。智慧易用,助你一鍵拍大片,輕鬆變身航拍大師。
- DJI FPV 沉浸式飛行體驗 - 飛臨其境
Coaxial Quadcopter
Design and Model Predictive Control of a Mars Coaxial Quadrotor
DelftAcopter
Google Drone
LONG-RANGE TACTICAL VTOL UAS (長程戰術垂直起降無人飛機系統)
VTOL (Vertical Take-Off and Landing) UAS (Unmanned Aircraft Systems)
雷虎科技
 雷虎轉型生產無人機 獲空中基地台訂單
雷虎轉型生產無人機 獲空中基地台訂單
此次雷虎股東會中亦展示各式中大型無人載具產品,其空中基地台無人直升機去年開花結果,得標NCC及中華電信(2412)五千萬元「空中基地台」訂單,強調未來將持續開發新型無人機及無人潛艇產品。
經緯航太
ALIAS 保全巡檢無人機 - 多旋翼機(multirotor)

- 應用範例:
- 夜間工廠空氣汙染及水汙染偵測
- 建築物安全狀況監測
- 無人機太陽能面板巡檢服務
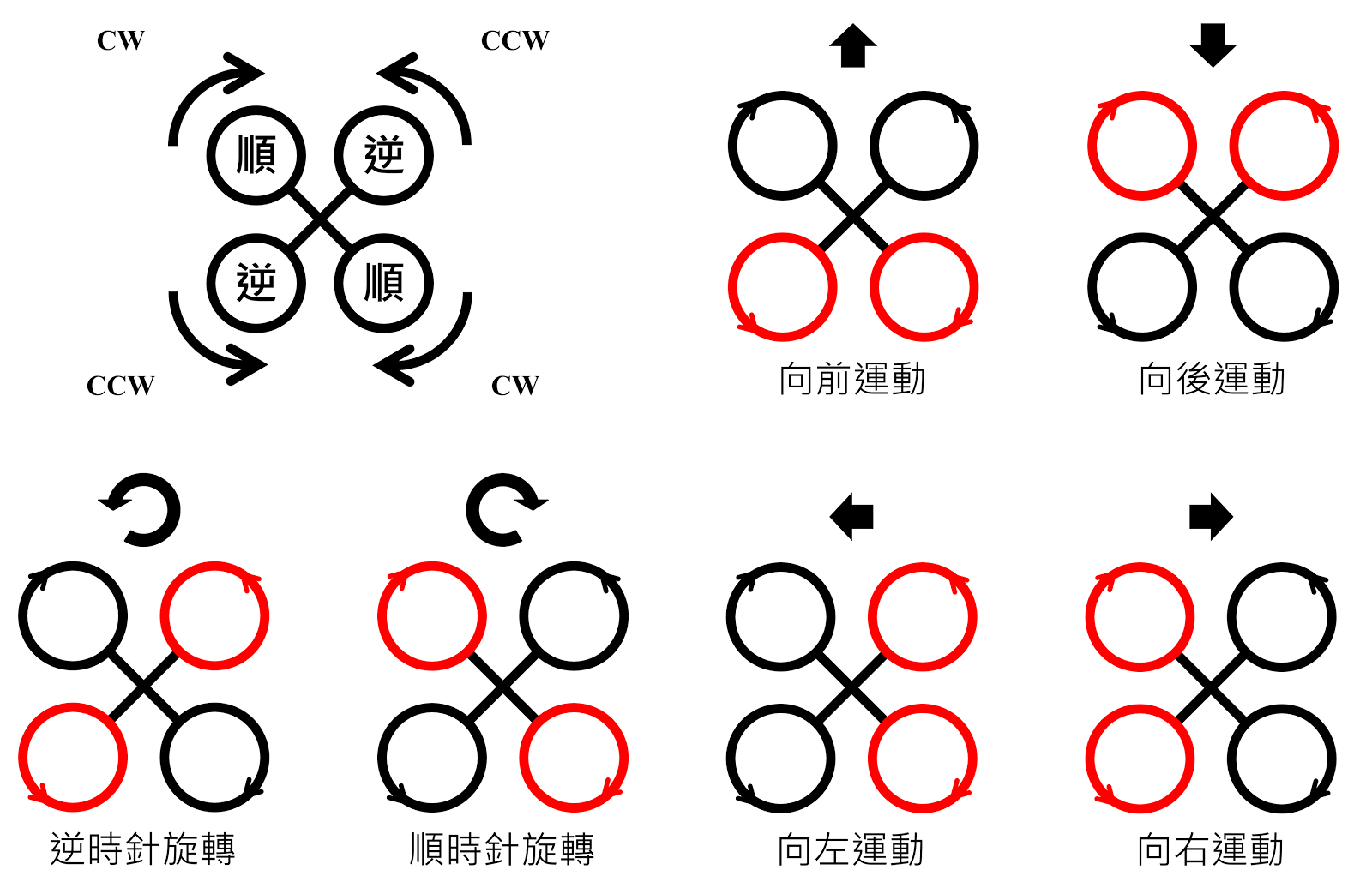
飛行原理

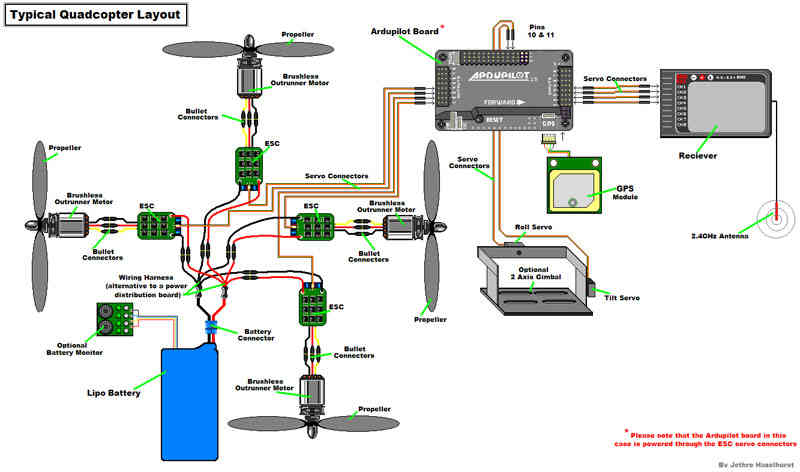
飛行器組成
系統圖

機架 (Frame)
通常我們會用對角馬達的軸距(M2M)來敘述機身的大小,如果對角馬達的兩個轉軸相距 450mm 的距離,則稱為 F450

- 腳架 (Landing Gear)

螺旋槳(Propeller)
四軸中有兩對螺旋槳,一對螺旋槳順時針旋轉,另一對螺旋槳則是逆時針旋轉,並不是所有螺旋槳都一樣的
通常會用像 1045 或 10x4.5 的方式來分別不同規格的螺旋槳,其意思為直徑10 inch,螺距 4.5 inch。
在相同轉速下,螺旋槳越長,攻角越大,所提供的升力就越大,但所受到的阻力亦會越大,所以轉動大的槳需要扭力大的馬達。

電子調速器(Electronic Speed Controller)ESC
通常市售的電調只需輸入 PWM,並透過調整 PWM 的占空比即可控制無刷馬達轉速

飛控板
 |
 |
 |
 |
 |
 |
慣性感測器
慣性測量單元(Inertial Measurement Unit, IMU)捕捉物體運動的資訊、測量物體姿態的一種電子元件,又稱為慣性感測器,主要由陀螺儀(Gyroscope)與加速度計(Accelerometer)組成,部分的應用中有時也會加入磁力計(Magnetometer)與氣壓計(Barometer)來輔助估算相關訊息,經常使用在載具的導航上面。 四軸飛行器上面常會使用一些感測器做為回授,來取得飛行器的姿態、航向或是高度等資訊,常見有陀螺儀、加速度計、磁力計以及氣壓計這四種,
 |
 |
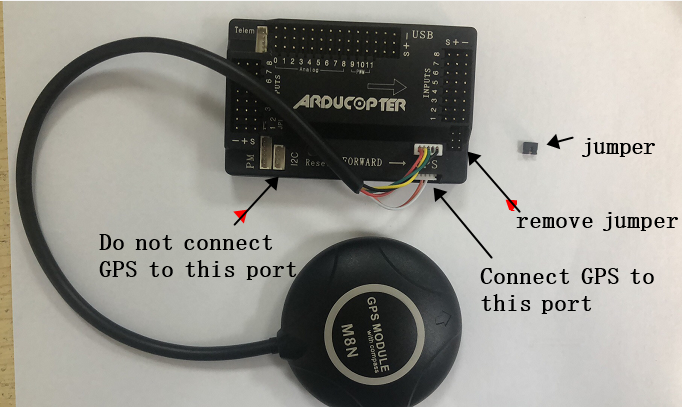
GPS 模組


遙控接收器 (RC receiver)
鋰電池 (LiPo)
Lithium-ion polymer battery
 |
 |
放電能力
電池的放電能力是以倍數(C)來表示的,1C是指電池用1C放電可以持續工作1小時。 例:2200mAH容量的電池持續工作1小時(1C),那么平均電流是2200mA,即2.2A.
航模鋰電
通常,11.1V的遙控航模鋰電池都由3片鋰電芯串聯而成(3S1P), 也就是說每片電芯的電壓為3.7V。
插頭型號:

圓桶型鋰電池型號
以最常見的18650電池為例,「18」為電池的直徑;「65」為電池長度;「0」則是指圓柱形的電池

無人機電機
電機的種類及區別
對於多旋翼無人機來說,小型無人機通常使用有刷電機,比如空心杯電機;而軸距較大,通常大於200mm左右的無人機都使用無刷電機。
目前的無人機多以無刷電機 中的永磁同步電機爲主。
無刷電機:可連續工作20000小時 左右,常規的使用壽命7-10年。
有刷電機:可連續工作5000小時左右,常規的使用壽命2-3年。
電機的基本參數
最大電流(A),最大電壓(V),KV值。
KV值:指電機在單位電壓下的轉速。一般KV值越高,代表電機的轉速越快。
比方說:KV值爲1000,意思是:此電機在1V電壓下,每分鐘轉速爲1000轉。
###電機的命名 四位數字,前兩位是定子的直徑,後兩位是定子的高度。如4108規格的電機,定子的直徑是41mm,高度是8mm。
如何選配電機
多旋翼的電機最大拉力總和不應低於總重的1.5倍,最好是兩倍朝上。
For 四軸F450/F350: 2212 950KV

組裝指南
QA250 組裝指南
F450 組裝指南
飛控板
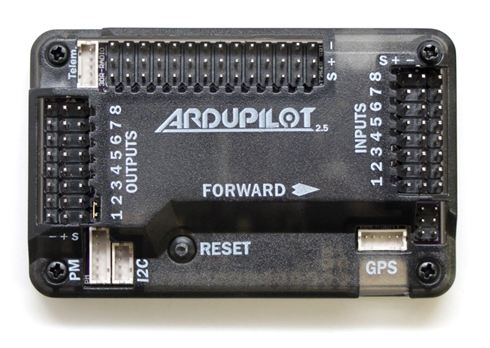
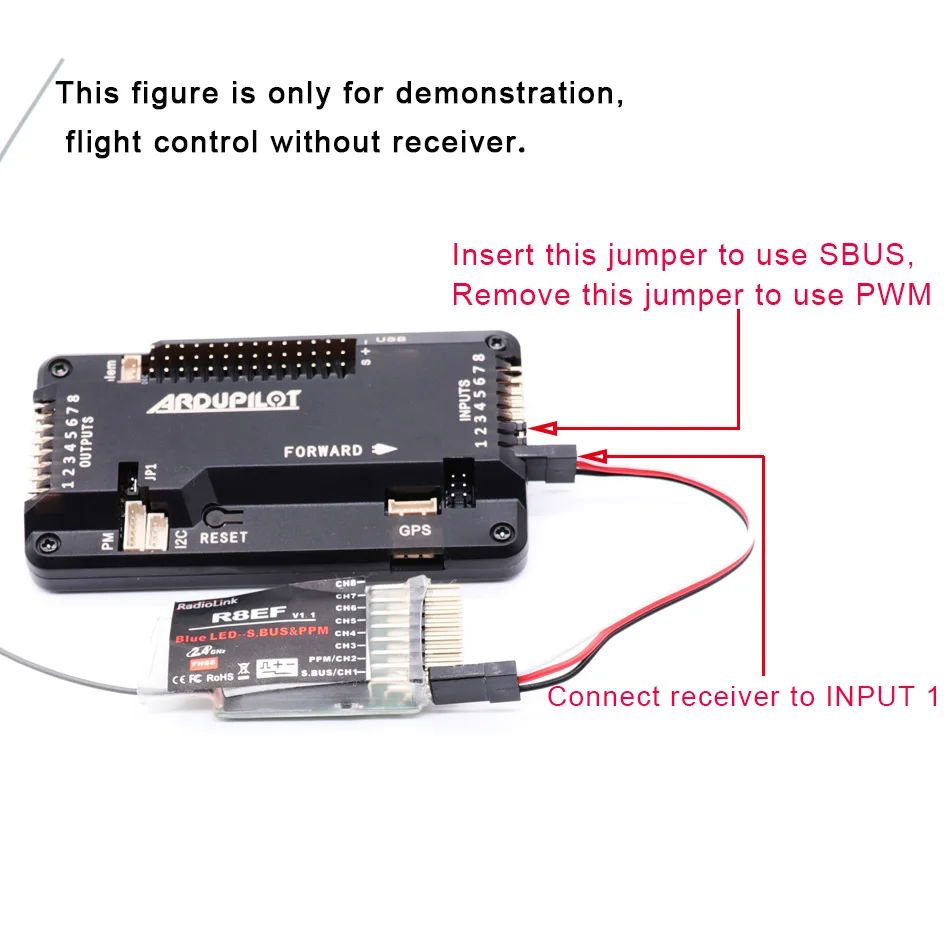
APM2.6/2.8

- Specification:
- Arduino Compatible!
- Includes 3-axis gyro, accelerometer, along with a high-performance barometer
- Onboard 4 MegaByte Dataflash chip for automatic datalogging
- Optional off-board GPS, uBlox LEA-6H module with Compass.
- One of the first open source autopilot systems to use Invensense’s 6 DoF Accelerometer/Gyro MPU-6000.
- Barometric pressure sensor upgraded to MS5607, from Measurement Specialties.
- Atmel’s ATMEGA2560 and ATMEGA32U-2 chips for processing and usb functions respectively.
- Weight: 30g
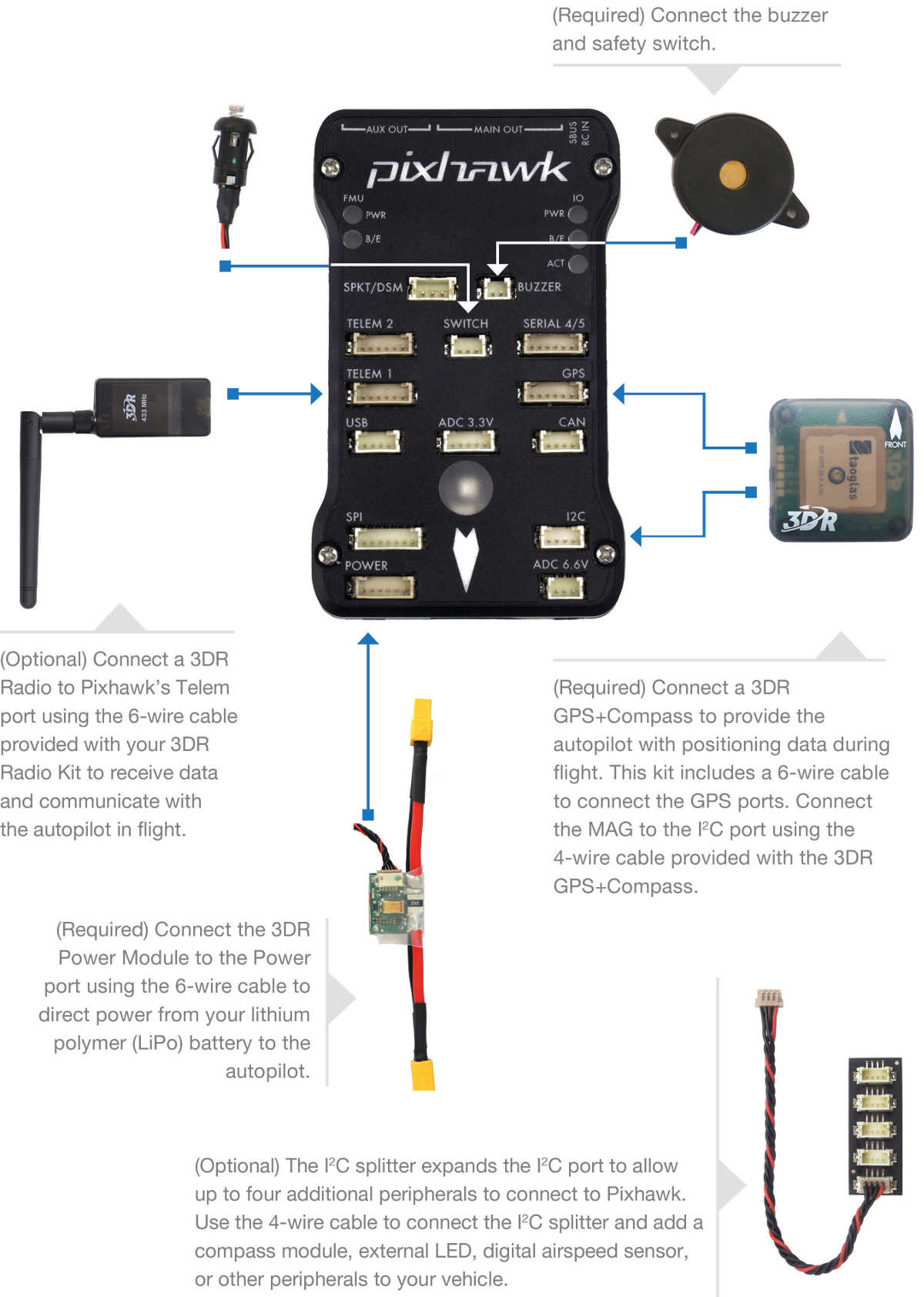
PixHawk 2.4.8
- Specification:
- Processor
- 32-bit ARM Cortex M4 core with FPU
- 168 Mhz/256 KB RAM/2 MB Flash
- 32-bit failsafe co-processor
- Sensors
- MPU6000 as main accel and gyro
- ST Micro 16-bit gyroscope
- ST Micro 14-bit accelerometer/compass (magnetometer)
- MEAS barometer
- Power
- Ideal diode controller with automatic failover
- Servo rail high-power (7 V) and high-current ready
- All peripheral outputs over-current protected, all inputs ESD protected
- Interfaces
- 5x UART serial ports, 1 high-power capable, 2 with HW flow control
- Spektrum DSM/DSM2/DSM-X Satellite input
- Futaba S.BUS input (output not yet implemented)
- PPM sum signal
- RSSI (PWM or voltage) input
- I2C, SPI, 2x CAN, USB
- 3.3V and 6.6V ADC inputs
- Dimensions
- Weight 38 g (1.3 oz)
- Width 50 mm (2.0”)
- Height 15.5 mm (.6”)
- Length 81.5 mm (3.2”)
- Processor
Pixhawk 4 (PX4)

- Specification:
- Main FMU Processor: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
- IO Processor: STM32F100
- 32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM
- On-board sensors:
- Accel/Gyro: ICM-20689
- Accel/Gyro: BMI055 or ICM20602
- Magnetometer: IST8310
- Barometer: MS5611
- GPS: u-blox Neo-M8N GPS/GLONASS receiver; integrated magnetometer IST8310
- Interfaces:
- 8-16 PWM outputs (8 from IO, 8 from FMU)
- 3 dedicated PWM/Capture inputs on FMU
- Dedicated R/C input for CPPM
- Dedicated R/C input for Spektrum / DSM and S.Bus with analog / PWM RSSI input
- Dedicated S.Bus servo output
- 5 general purpose serial ports
- 3 I2C ports
- 4 SPI buses
- Up to 2 CANBuses for dual CAN with serial ESC
- Analog inputs for voltage / current of 2 batteries
- Power System:
- Power module output: 4.9~5.5V
- USB Power Input: 4.75~5.25V
- Servo Rail Input: 0~36V
- Weight and Dimensions:
- Weight: 15.8g
- Dimensions: 44x84x12mm
- Other Characteristics:
- Operating temperature: -40 ~ 85°c
- Main FMU Processor: STM32F765
DIY飛控板: ESP32copter
 |
 |
飛控韌體
PX4: Open Source Autopilot For Drone Developers


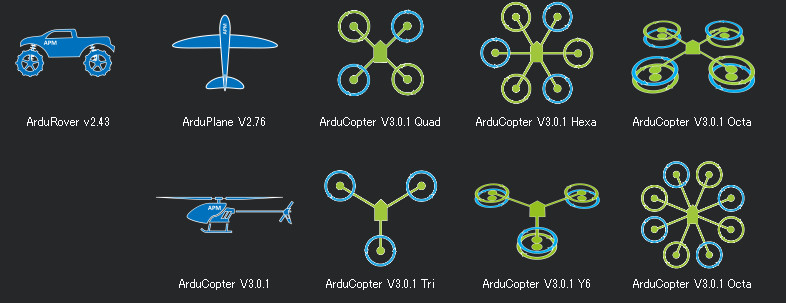
Ardupilot
ArduPilot is the most advanced, full-featured, and reliable open source autopilot software available.
Copter – Plane – Rover – Sub – Antenna Tracker
Mission Planner
Download the latest Mission Planner installer from here.
Loading Firmware
-
Loading Firmware onto flight-control board (first time only)
- APM飛控與調參
- Pixhawk飛控 設定重點 F450
- Pixhawk4 刷 Ardupilot 千萬一定要注意的步驟
Flight Modes & Features
Flight Modes (飛行模式)
Recommended Flight Modes:
Additional Flight Modes:
- Acro (競技模式)
- Release the sticks and the vehicle will maintain its current attitude and will not return to level (attitude hold).
- AirMode
- Heli_Autorotate (自旋) for traditional helicopters only.
- AutoTune (自調)
- automatically tune the Stabilize P, Rate P and D, and maximum rotational acceleration
- Brake (煞停)
- Circle (繞圈)
- Drift (漂移)
- Flip (翻滾)
- [FlowHold (穩停)] (https://ardupilot.org/copter/docs/flowhold-mode.html#flowhold-mode)
- FlowHold mode uses an optical flow sensor to hold position without the need for a GPS nor a downward facing Lidar.
- Follow (跟隨)
- Guided (and Guided_NoGPS)
- Land (著陸)
- PosHold (維持位置)
- Sport
- Throw (拋飛)
- Follow Me (跟著我)
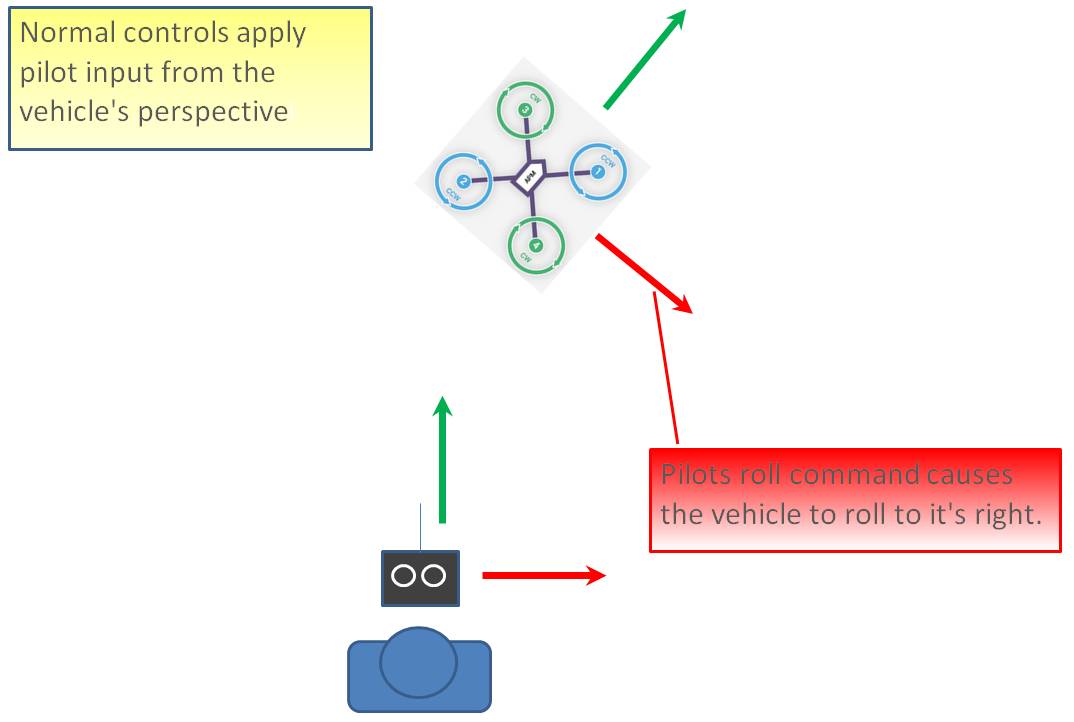
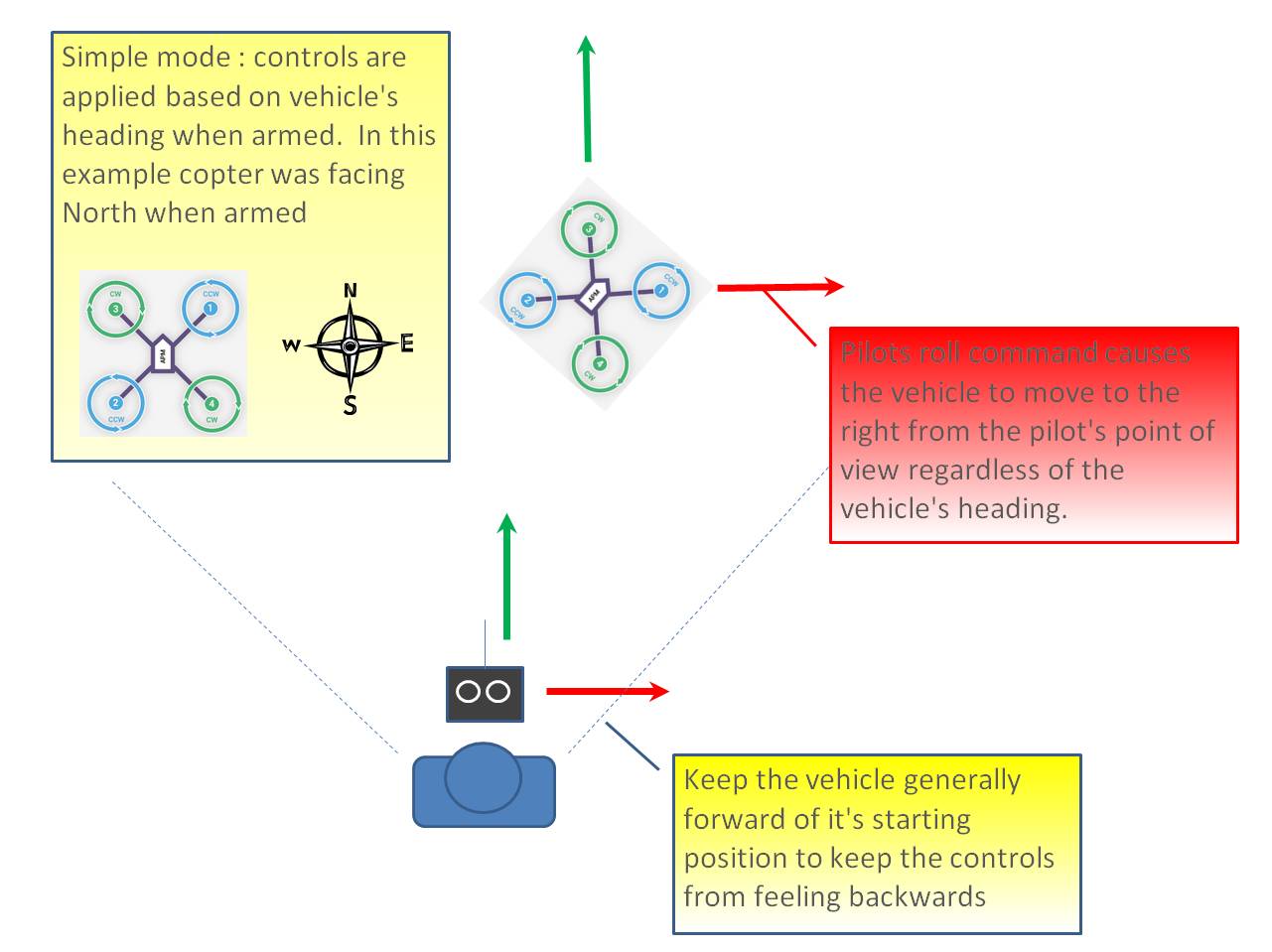
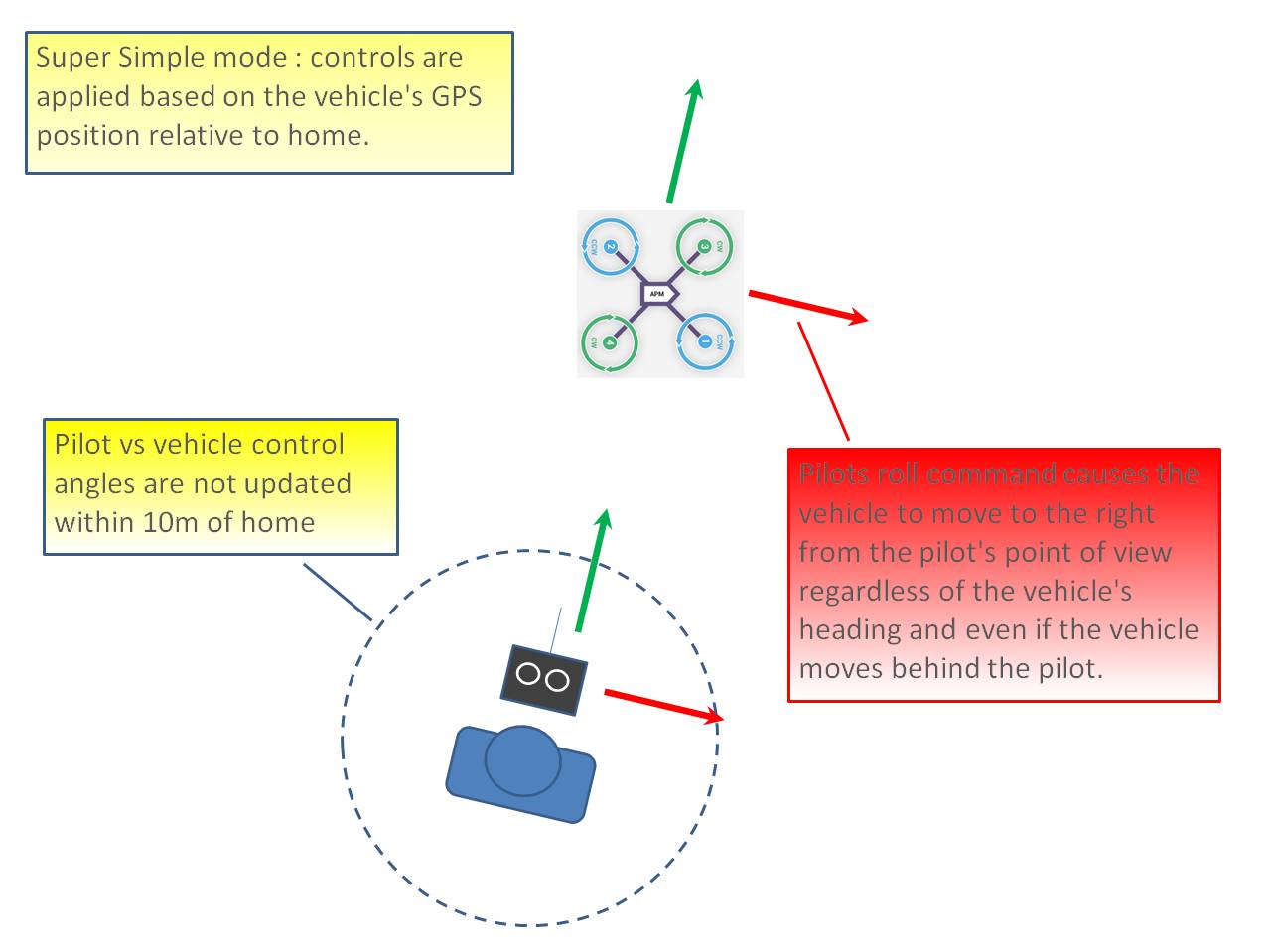
- Simple and Super Simple
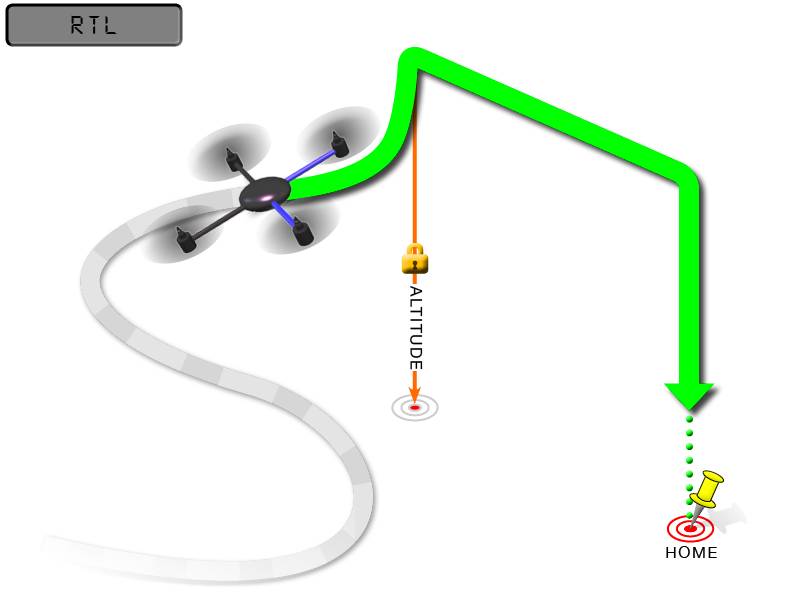
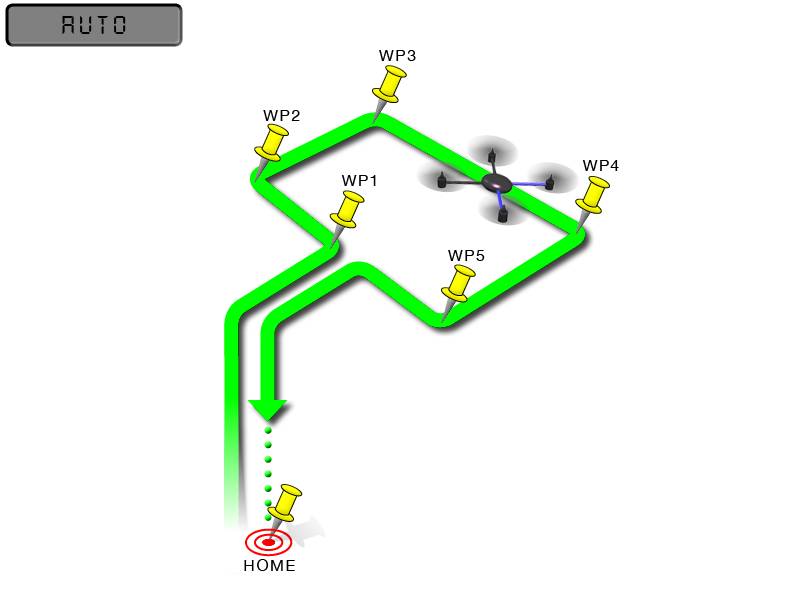
- Smart RTL (Return-to-Launch) 回發射點
- SysID (System Identification) 系統識別
- Turtle
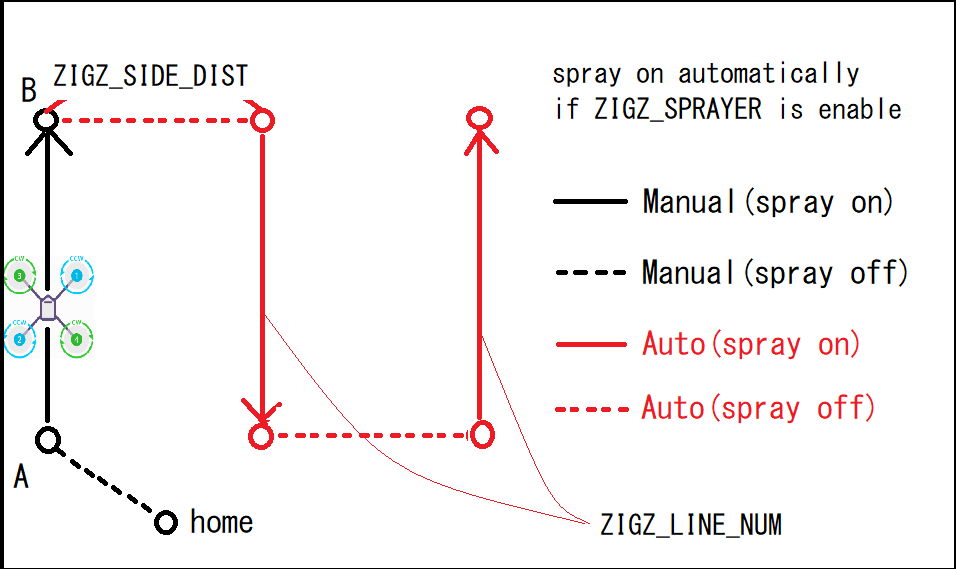
- ZigZag
- Avoid_ADSB
- ADS-B (aka Automatic Dependent Surveillance Broadcast) (自動相關監視廣播)
Flight Features (飛行功能)
For a full set of features see the full parameter list and the MAVLink protocol definition.
- Automatic Takeoff (自動起飛)
- Hand Launching (手拋發射)
- Catapult Launching (發射器發射)
- Bungee Launching (蹦極發射)
- Runway Takeoffs (跑道起飛)
- Testing Ground Takeoff in FBWA mode (Fly By Wire_A mode)
- Speed Scaling Issues with no Airspeed Sensor
- Automatic Landing (自動降落)
- Setting Flare point (設定閃光點)
- Controlling the glide slope (控制下滑坡道)
- Landing Airspeed (降落空速)
- Controlling the approach (控制著近)
- Controlling the Flare (控制拉平)
- After the Flare (拉平之後)
- Using a rangefinder (使用測距儀)
- Inverted Flight (顛倒飛行)
- Stall Prevention (失速預防)
- Geo-Fencing in Plane (地理圍欄)
- Terrain Following (地形跟隨)
- see Copter specific terrain following instructions here.
- The ground station is normally responsible for providing the raw terrain data which is sent to the aircraft via MAVLink.
- Terrain following works by maintaining a terrain database on the microSD card on the autopilot which gives the terrain height in meters above sea level for a grid of geographic locations.
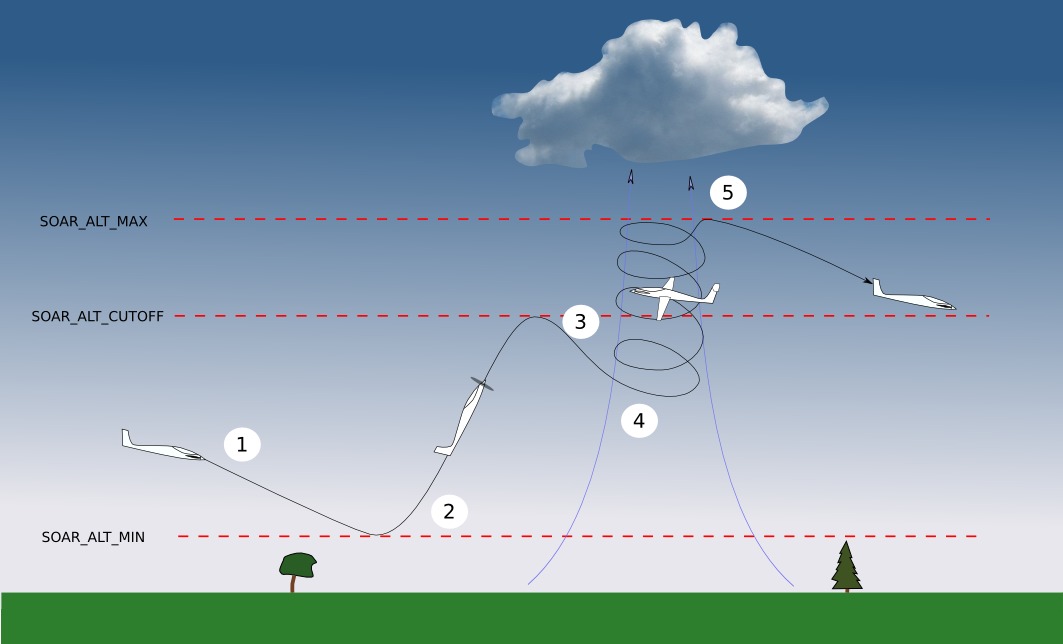
- Soaring (翱翔)
- Automated Aerobatics (自動化特技飛行)
- ArduPilot has the capability of executing aerobatics from a LUA script
- Moving Vehicle/Ship Takeoff/Landing (移動載台之起飛與降落)
- To use this feature you need a beacon setup on the landing platform.
- The beacon will be broadcasting its position to allow the QuadPlane to track its moving HOME position, similar to Copter’s Follow Mode (跟隨模式).
- dual GPS blending
Ground Control Station (地面控制站)
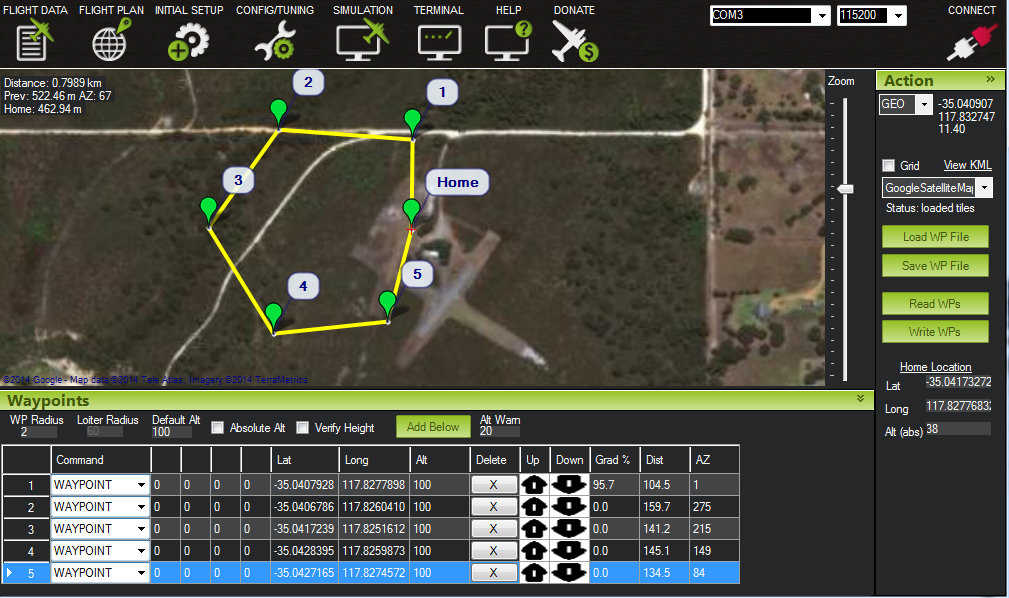
Mission Planner
Mission Planner is a full-featured ground station application for the ArduPilot open source autopilot project.

MAVlink
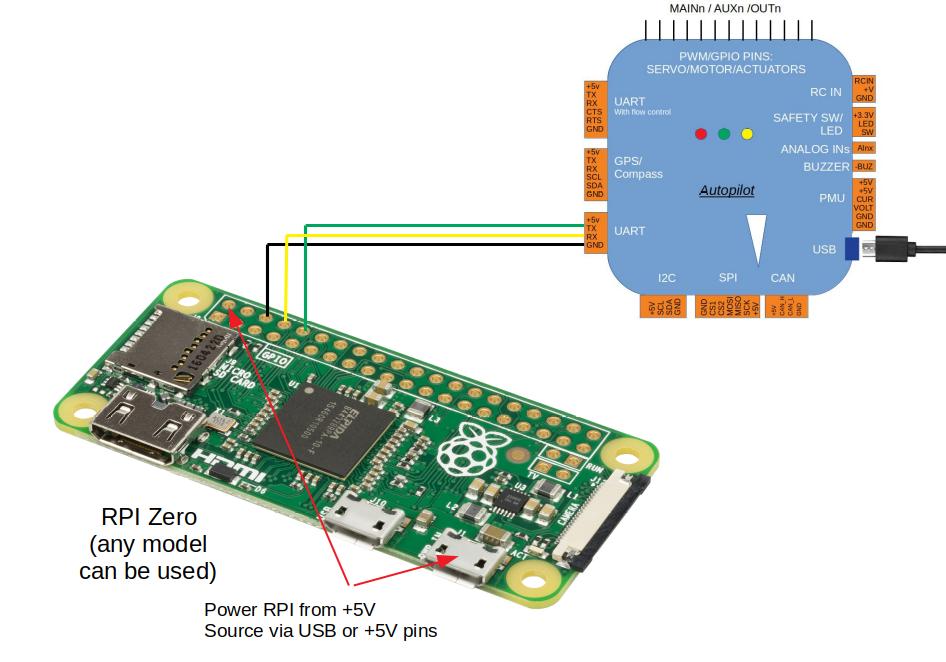
Communicating with Raspberry Pi via MAVLink
- Connect the flight controller’s TELEM2 port to the RPi’s Ground, TX and RX pin
先進技術
Quadcopter flies in areas without GPS signals
混合動力無人機
- 混合動力無人機的發展 - 長榮大學無人機中心


This site was last updated October 07, 2024.