Inertial Measurement Unit (IMU)
Introduction to Inertial Measurement Unit (IMU) including MPU6050, MPU9250.
IMU - Inertial Measurement Unit (慣性量測單元)
慣性測量單元是測量物體三軸姿態角以及加速度的裝置。
一般一個IMU內會裝有三軸的陀螺儀和三個方向的加速度計,來測量物體在三維空間中的角速度和加速度,並以此解算出物體的姿態。
Accelerometer(加速計)
An accelerometer is a device that measures proper acceleration (“gravity force”).
an accelerometer at rest on the surface of the Earth will measure an acceleration g= 9.81 m/s2 straight upwards (測量加速度的裝置)
Gyroscope (陀螺儀)
A gyroscope is a device for measuring or maintaining orientation, based on the principles of angular momentum, it is to measure the rate of changes of the angles (deg/s)
(一種感測與維持方向的裝置,量測角速度)
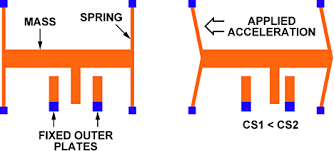
 MEMS Gyroscope
MEMS Gyroscope
Magnetic Field Sensor (電子羅盤)
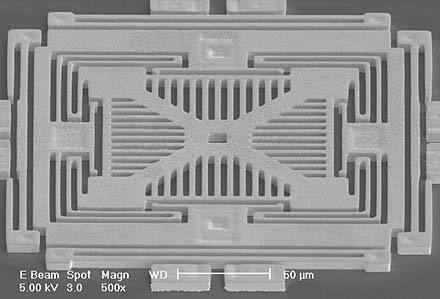
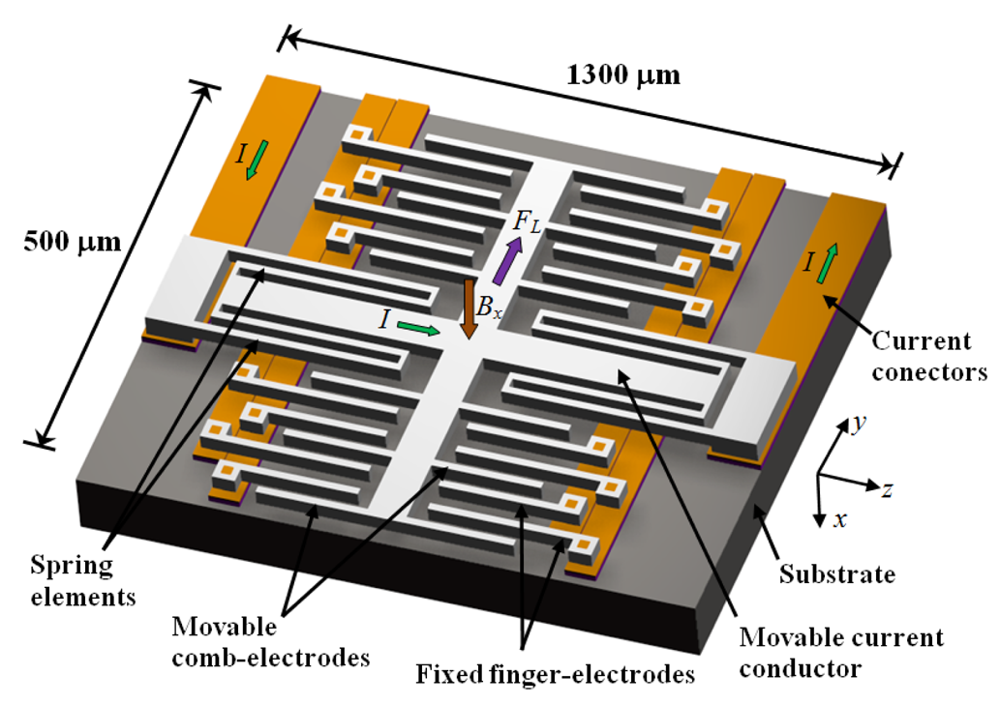
Resonant Magnetic Field Sensors Based On MEMS Technology
9-axis IMU(九軸慣性感測器)


Comparing Gyroscopes
ST ISM330DHC
Uncalibrated offsets are low, the one we grabbed had 0.006 rad/s (0.35 deg/s) max offset.
Datasheet’s Angular rate zero-rate level is typical ±1 deg/s.
No-motion observed noise was an incredibly low ±0.002 rad/s (±0.06 deg/sec) when running at 104 Hz and no filters on. Check the datasheet for more details!

LSM6DSOX
Uncalibrated offsets are low, the one we grabbed had 0.007 rad/s (0.42 deg/s) max offset.
Datasheet’s Angular rate zero-rate level is typical ±1 deg/s.
No-motion observed noise was an incredibly low ±0.003 rad/s (±0.17 deg/sec) when running at 104 Hz and no filters on. Check the datasheet for more details!

LSM6DS33
Uncalibrated offsets are fair, the one we grabbed had 0.034 rad/s (2 deg/s) max offset.
Datasheet’s Angular rate zero-rate level is typical ±10 deg/s!
No-motion observed noise was ±0.015 rad/s (±0.85 deg/sec) when running at 104 Hz and no filters on. Check the datasheet for more details!

LSM9DS1
Uncalibrated offsets are pretty good, the one we grabbed had 0.02 rad/s (1.2 deg/s) max offset.
Datasheet’s Angular rate zero-rate level is typical ±30 deg/s!
However, we noticed spikes of gyro data well outside the expected range. When those spikes are ignore, the no-motion observed noise was +- 0.007 rad/s (±0.4 deg/sec) at 1 KHz with the 408 Hz bandwidth filter on. Check the datasheet for more details!


MPU-6050
Uncalibrated offsets are fair, the one we grabbed had 0.04 rad/s (2.3 deg/s) max offset.
Datasheet’s Angular rate zero-rate level is typical ±20 deg/s!
No-motion observed noise was +- 0.05 rad/s (±0.29 deg/sec) with the 260 Hz bandwidth filter on. Check the datasheet for more details!

NXP FXAS21002
Uncalibrated offsets are pretty good - the one we grabbed had 0.01 rad/s (0.57 deg/s) max offset.
Datasheet’s Angular rate zero-rate level is typical post-mount ±50 LSB (NOT deg/s) - at 250 deg/s rate, that translates to ±0.4 deg/s
No-motion observed noise was +- 0.01 rad/s (±0.55 deg/sec) at 100 Hz output. Check the datasheet for more details!

ICM-20649
Uncalibrated offsets are not bad, the one we grabbed had 0.023 rad/s (1.3 deg/s) max offset.
Datasheet’s Angular rate zero-rate level is typical ±5 deg/s
No-motion observed noise was +- 0.015 rad/s (±0.86 deg/sec) at 1.1KHz. Check the datasheet for more details!

AHRS (Attitude and Heading Reference System)
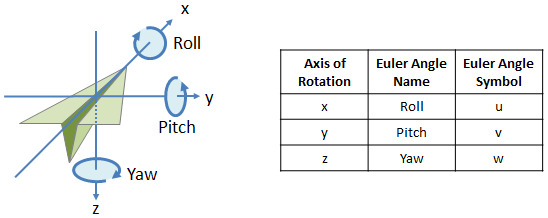
Euler Angles

Yaw Pitch Roll (YPR)

The coordinate system and rotation conventions

InvenSense MPU6050 & MPU9250
- MPU6050
MPU-6000 and MPU-6050 Product Specification Revision 3.4
MPU-6000 and MPU-6050 Register Map and Descriptions Revision 4.2

- MPU9250 Datasheet

- BNO080 Datasheet

Arduino Library: MPU6050


- Download Processing & Install
- Tools> add Tool> Library> Toxi
Sketchbook> IMU> MPU6050_DMP6_plane
- #define OUTPUT_TEAPOT

- click ./MPUplane/MPUPlane.pde
- modify port name:
String portName = "COM3"; - press Run

Sketchbook> IMU> MPU6050_DMP_Teapot

- click ./MPU6050Teapot/MPU6050Teapot.pde
- modify port name:
String portName = "COM3"; - press Run
Sketchbook> IMU>MPU6050_KalmanFilter
- Initialize IMU & get Acceleration
imu.initialize(); delay(100); imu.getAcceleration(&accX, &accY, &accZ); -
atan2


- Complementary Filter
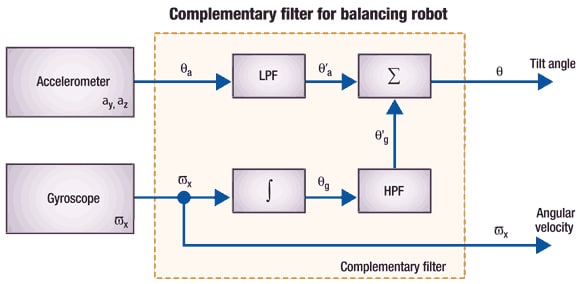
// Calculate gyro angle without any filter
gyroXangle += gyroXrate * dt
gyroYangle += gyroYrate * dt
// Calculate the angle using a Complimentary filter
compAngleX = 0.97 * (compAngleX + gyroXrate * dt) + 0.03 * accXangle
compAngleY = 0.97 * (compAngleY + gyroYrate * dt) + 0.03 * accYangle

- Kalman Filter
Kalman.cpp
float Q_angle = 0.001f;
float Q_bias = 0.003f;
float R_measure = 0.03f;
float angle = 0.0f; // Reset the angle
float bias = 0.0f; // Reset bias
float P[2][2] = {0.0, 0.0, 0.0, 0.0};
float Kalman::getAngle(float newAngle, float newRate, float dt) {
rate = newRate - bias;
angle += dt * rate;
// Update estimation error covariance - Project the error covariance ahead
/* Step 2 */
P[0][0] += dt * (dt*P[1][1] - P[0][1] - P[1][0] + Q_angle);
P[0][1] -= dt * P[1][1];
P[1][0] -= dt * P[1][1];
P[1][1] += Q_bias * dt;
// Discrete Kalman filter measurement update equations - Measurement Update ("Correct")
// Calculate Kalman gain - Compute the Kalman gain
/* Step 4 */
float S = P[0][0] + R_measure; // Estimate error
/* Step 5 */
float K[2]; // Kalman gain - This is a 2x1 vector
K[0] = P[0][0] / S;
K[1] = P[1][0] / S;
// Calculate angle and bias - Update estimate with measurement zk (newAngle)
/* Step 3 */
float y = newAngle - angle; // Angle difference
/* Step 6 */
angle += K[0] * y;
bias += K[1] * y;
// Calculate estimation error covariance - Update the error covariance
/* Step 7 */
float P00_temp = P[0][0];
float P01_temp = P[0][1];
P[0][0] -= K[0] * P00_temp;
P[0][1] -= K[0] * P01_temp;
P[1][0] -= K[1] * P00_temp;
P[1][1] -= K[1] * P01_temp;
return angle;
};
Arduino Library: MPU9250

Sketchbook>MPU9250_DMP_Teapot


- click MPU9250Teapot/MPU9250Teapot.pde

Sketchbook>MPU9250_BasicAHRS2
x-io Technologies publications
Sketchbook> Robot> Esp32Copter


Ardupilot
Mission Planner Ground Control Station
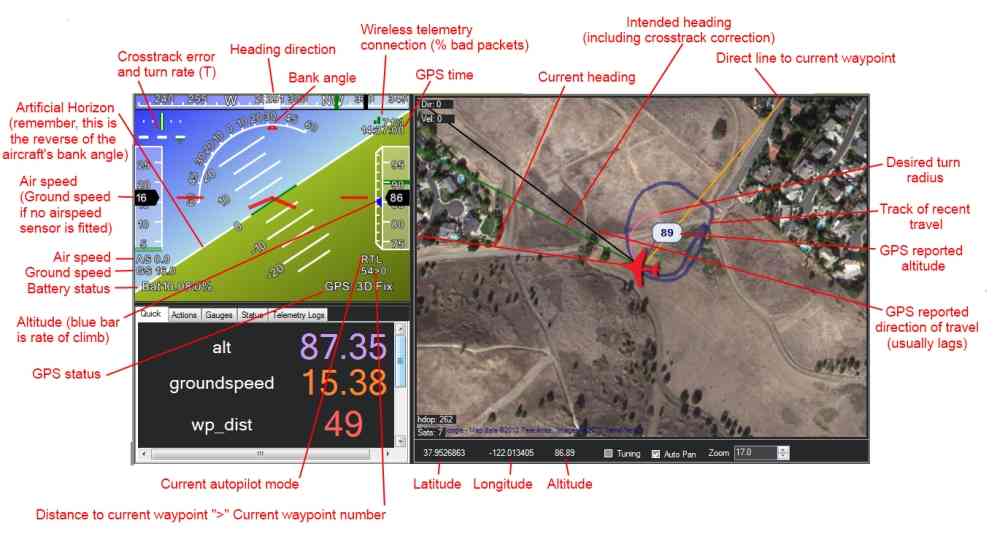
view of HUD
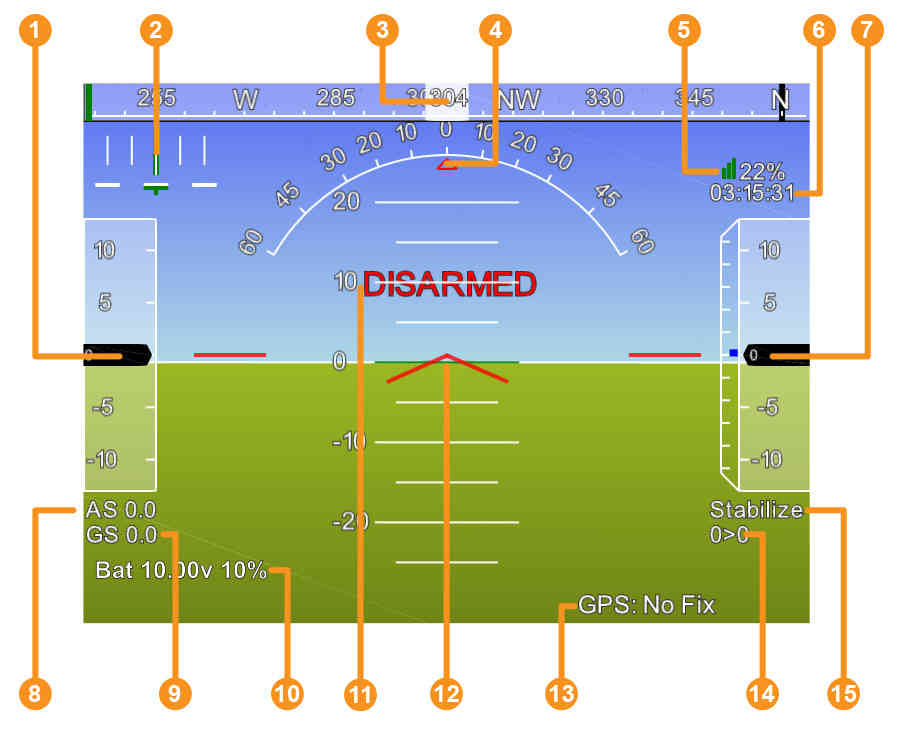
- Air speed ( Ground speed if no airspeed sensor is fitted )
- Crosstrack error and turn rate (T)
- Heading direction
- Bank angle
- Telemetry connection link quality (averaged percentage of good packets)
- GPS time
- Altitude ( blue bar is rate of climb )
- Air speed
- Ground speed
- Battery status
- Artificial Horizon
- Aircraft Attitude
- GPS Status
- Distance to Waypoint > Current Waypoint Number
- Current Flight Mode
This site was last updated October 07, 2024.