Reinforcement Learning for Robotics
Introduction to Robot Gym
Gym-Gazebo
Code: erlerobot/gym-gazebo
 |
 |
 |
DART (Dynamic Animation and Robotics Toolkit)
Dartsim/dart
- Python bindings: dartpy, pydart2 (deprecated)
- OpenAI Gym with DART support: gym-dart (dartpy based), DartEnv (pydart2 based, deprecated)
PyBullet-Gym
code: rkuo2000/pybullet-gym
- installation
pip install gym pip install stable-baselines3 git clone https://github.com/rkuo2000/pybullet-gym export PYTHONPATH=$PATH:/home/yourname/pybullet-gym
Train
python train.py Ant 10000000
Enjoy with trained-model
python enjoy.py Ant
Enjoy with pretrained weights
python enjoy_Ant.py
python enjoy_HumanoidFlagrunHarder.py (a copy from pybulletgym/examples/roboschool-weights/enjoy_TF_*.py)
PyBullet-Robots
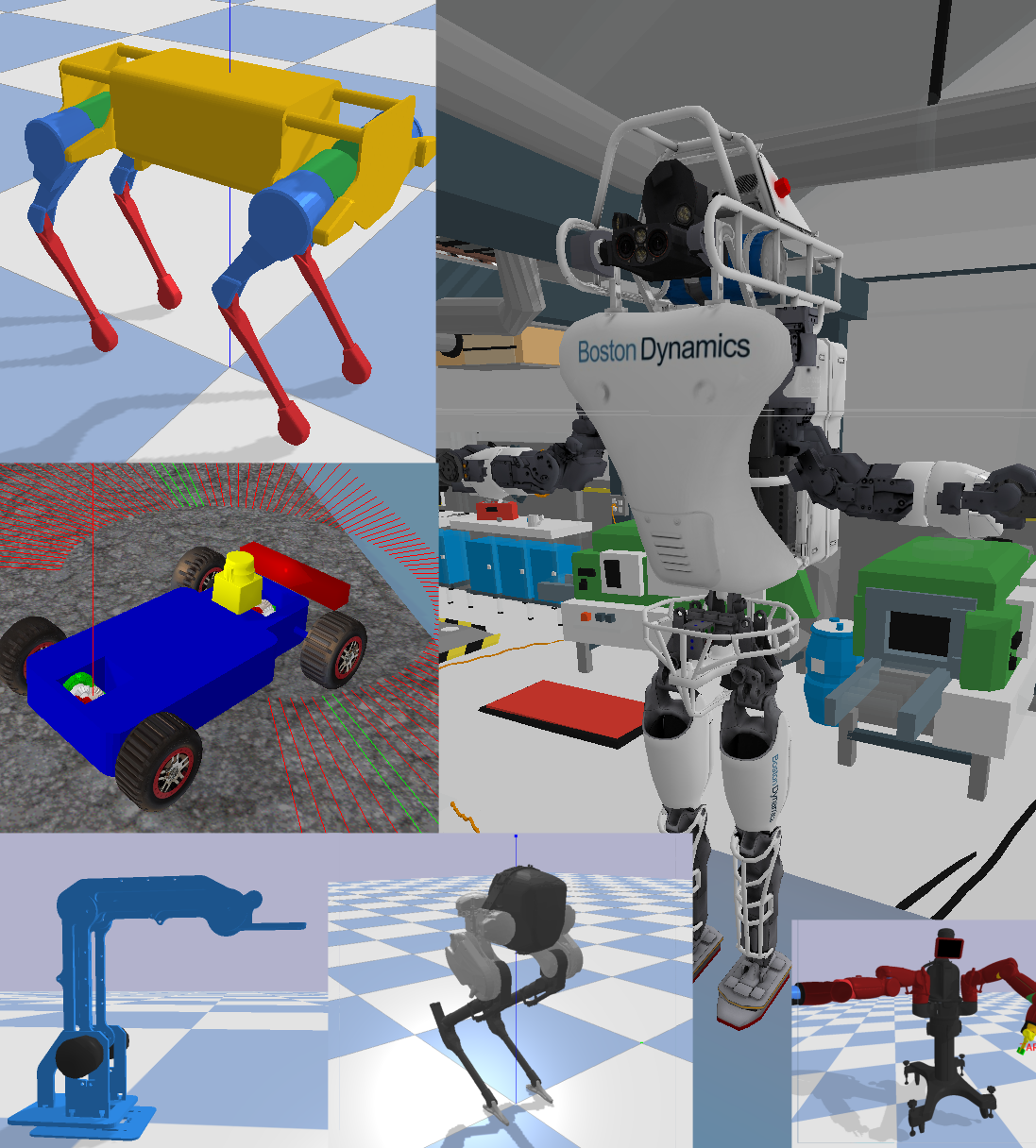
env_name = “AtlasPyBulletEnv-v0”
atlas_v4_with_multisense.urdf
OP3 Soccer
Paper: Learning Agile Soccer Skills for a Bipedal Robot with Deep Reinforcement Learning
RoboCar Gym
Pybullet-RoboCar
Blog:
Creating OpenAI Gym Environments with PyBullet (Part 1)
Creating OpenAI Gym Environments with PyBullet (Part 2)

Quadruped Gym
Motion Imitation
Code: TF 1.15
Code: PyTorch
For Training:
python motion_imitation/run_torch.py --mode train --motion_file 'dog_pace.txt|dog_spin.txt' \
--int_save_freq 10000000 --visualize --num_envs 50 --type_name 'dog_pace'
For Testing:
python motion_imitation/run_torch.py --mode test --motion_file 'dog_pace.txt' --model_file 'file_path' \
--encoder_file 'file_path' --visualize
Rex: an open-source quadruped robot
Code: nicrusso7/rex-gym

Drones Gym
PyBullet-Gym for Drones


- Installation
sudo apt install ffmpeg pip install numpy pillow matplotlib cycler pip install gym pybullet stable_baselines3 ray[rllib] git clone https://github.com/rkuo2000/gym-pybullet-drones.git cd gym-pybullet-drones -
Train & Enjoy
python train.py# modify train.py for different env, algorithm and timesteps
python enjoy.py# modify enjoy.py for different env -
Fly using DSLPIDControl.py:(PID飛行)
python examples/fly.py --num_drones 1

-
To learn take-off:(起飛)
python examples/learn.py

compare.pywhich replays and compare to a trace saved infiles/example_trace.pkl
Experiments
cd experiments/learning
env : hover, takeoff, flythrugate, tune(旋停, 起飛, 穿越, 調整)
algo: a2c, ppo, sac, td3, ddpg
- To learn hover:(旋停)
python singleagent.py --env hover --algo a2c
To visualize the best trained agent:
python test_singleagent.py --exp ./results/save-hover-a2c
For multi-agent RL, using rllib:
python multiagent.py --num_drones 3 --env hover --algo a2c --num_workers 2
Flightmare
Flightmare is a flexible modular quadrotor simulator.

- Introduction
- Prerequisites
- Install Python Packages
- running ROS
roslaunch flightros rotors_gazebo.launch - flighRL
cd /path/to/flightmare/flightrl pip install . cd examples python3 run_drone_control.py --train 1
AirSim

Assistive Gym
Paper: Assistive Gym: A Physics Simulation Framework for Assistive Robotics

-
Four collaborative robots (PR2, Jaco, Baxter, Sawyer)

-
Support for the Stretch and PANDA robots
 |
 |
Code: Healthcare-Robotics/assistive-gym
Assistive VR Gym
Paper: Assistive VR Gym: Interactions with Real People to Improve Virtual Assistive Robots
Code: Healthcare-Robotics/assistive-vr-gym

Learning Dexity
Dexterous Gym


DexPilot
Paper: DexPilot: Vision Based Teleoperation of Dexterous Robotic Hand-Arm System

TriFinger
Paper: TriFinger: An Open-Source Robot for Learning Dexterity



Code: TriFinger Robot Simulation
Multi-Task Reset-Free (MTRF) Learning
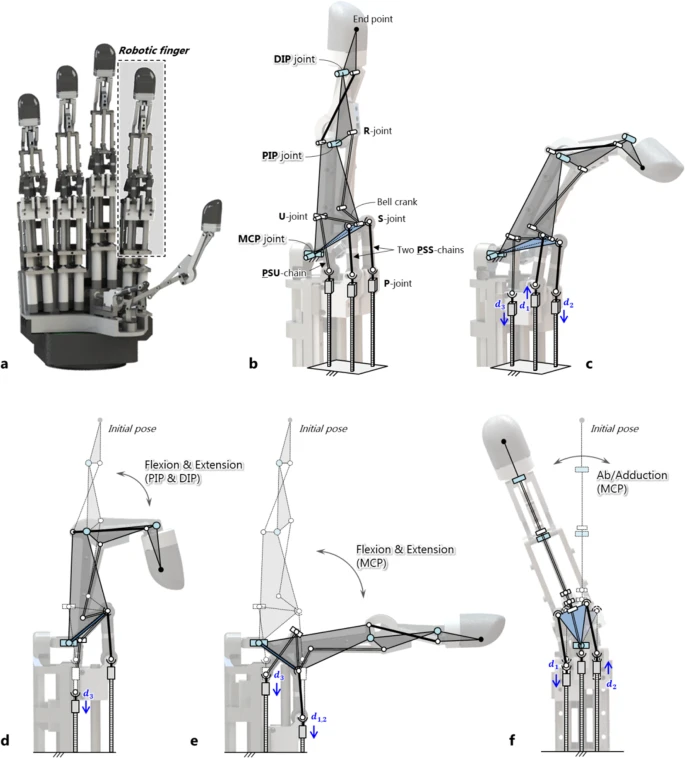
Dexterous Anthropomorphic Robotic Hand
Blog: Robotic hand can crush beer cans and hold eggs without breaking them

Paper: Integrated linkage-driven dexterous anthropomorphic robotic hand
Robotic Telekinesis
Robotic Telekinesis: Learning a Robotic Hand Imitator by Watching Humans on Youtube
Fixed-Finger Gripper
Paper: F1 Hand: A Versatile Fixed-Finger Gripper for Delicate Teleoperation and Autonomous Grasping
Learning Diverse Dexterous Grasps
ViLa
Blog: https://bangqu.com/9Fa2ra.html

Mobile ALOHA
Paper: Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation
Github: https://github.com/MarkFzp/mobile-aloha
Code: https://github.com/MarkFzp/act-plus-plus
ALOHA 2
Paper: ALOHA 2: An Enhanced Low-Cost Hardware for Bimanual Teleoperation
ALOHA unleashed
Paper: ALOHA Unleashed: A Simple Recipe for Robot Dexterity

DemoStart
Paper: DemoStart: Demonstration-led auto-curriculum applied to sim-to-real with multi-fingered robots
Blog: Our latest advances in robot dexterity


ReKep
Paper: ReKep: Spatio-Temporal Reasoning of Relational Keypoint Constraints for Robotic Manipulation
Code: https://github.com/huangwl18/ReKep
This site was last updated October 02, 2025.