Reinforcement Learning for Robotics
Introduction to Reinforcement Learning for Robot / Drone.
AI-Robots
Figure AI
Sanctuary AI
ADAM
Paper: ADAM: a robotic companion for enhanced quality of life in aging populations
End-to-end Reinforcement Learning of Robotic Manipulation with Robust Keypoints Representation

Embodied AI
Blog: Overview of Embodied Artificial Intelligence
Embodied AI is the field for solving AI problems for virtual robots that can move, see, speak, and interact in the virtual world and with other virtual robots — these simulated robot solutions are then transferred to real world robots
The simulated environments for Embodied AI training: SUNCG, Matterport3D, iGibson, Replica, Habitat, and DART
Matterport3D
Paper: Matterport3D: Learning from RGB-D Data in Indoor Environments
Code: Matterport3D

Replica
Code: Replica Dataset

iGibson
Paper: iGibson 2.0: Object-Centric Simulation for Robot Learning of Everyday Household Tasks
Code: StanfordVL/iGibson

Habitat 2.0
Paper: Habitat 2.0: Training Home Assistants to Rearrange their Habitat
Code: facebookresearch/habitat-sim
Indoor Navigation
Autonomous Indoor Robot Navigation
Paper: Deep Reinforcement learning for real autonomous mobile robot navigation in indoor environments
Code:

DDPG 路徑規劃
Blog: 智慧送餐服務型機器人導航路徑之設計
路徑跟隨器有四個主軸:
- 送餐路徑生成:從文件或上層發佈訊息獲取預先定義的路徑。
- 編輯航線路徑點:清除路徑中不合適的航線路徑點。
- MFAC無模型自適應控制之航段管制:自動調整送餐路徑之導航點之間的航段長度,依序共分成路徑跟隨之依據以及MFAC無模型自適應控制之應用。
-
DWA之區域路徑傳遞:依照MFAC調整之結果,產出相關生成路徑,並以DWA進行區域設定。
- 自走車基於DDPG的室內路徑規劃
Long-Range Indoor Navigation
Paper: Long-Range Indoor Navigation with PRM-RL

Gym-Gazebo
Code: erlerobot/gym-gazebo
 |
 |
 |
DART (Dynamic Animation and Robotics Toolkit)
Dartsim/dart
- Python bindings: dartpy, pydart2 (deprecated)
- OpenAI Gym with DART support: gym-dart (dartpy based), DartEnv (pydart2 based, deprecated)
PyBullet-Gym
code: rkuo2000/pybullet-gym
- installation
pip install gym pip install stable-baselines3 git clone https://github.com/rkuo2000/pybullet-gym export PYTHONPATH=$PATH:/home/yourname/pybullet-gym
Train
python train.py Ant 10000000
Enjoy with trained-model
python enjoy.py Ant
Enjoy with pretrained weights
python enjoy_Ant.py
python enjoy_HumanoidFlagrunHarder.py (a copy from pybulletgym/examples/roboschool-weights/enjoy_TF_*.py)
PyBullet-Robots
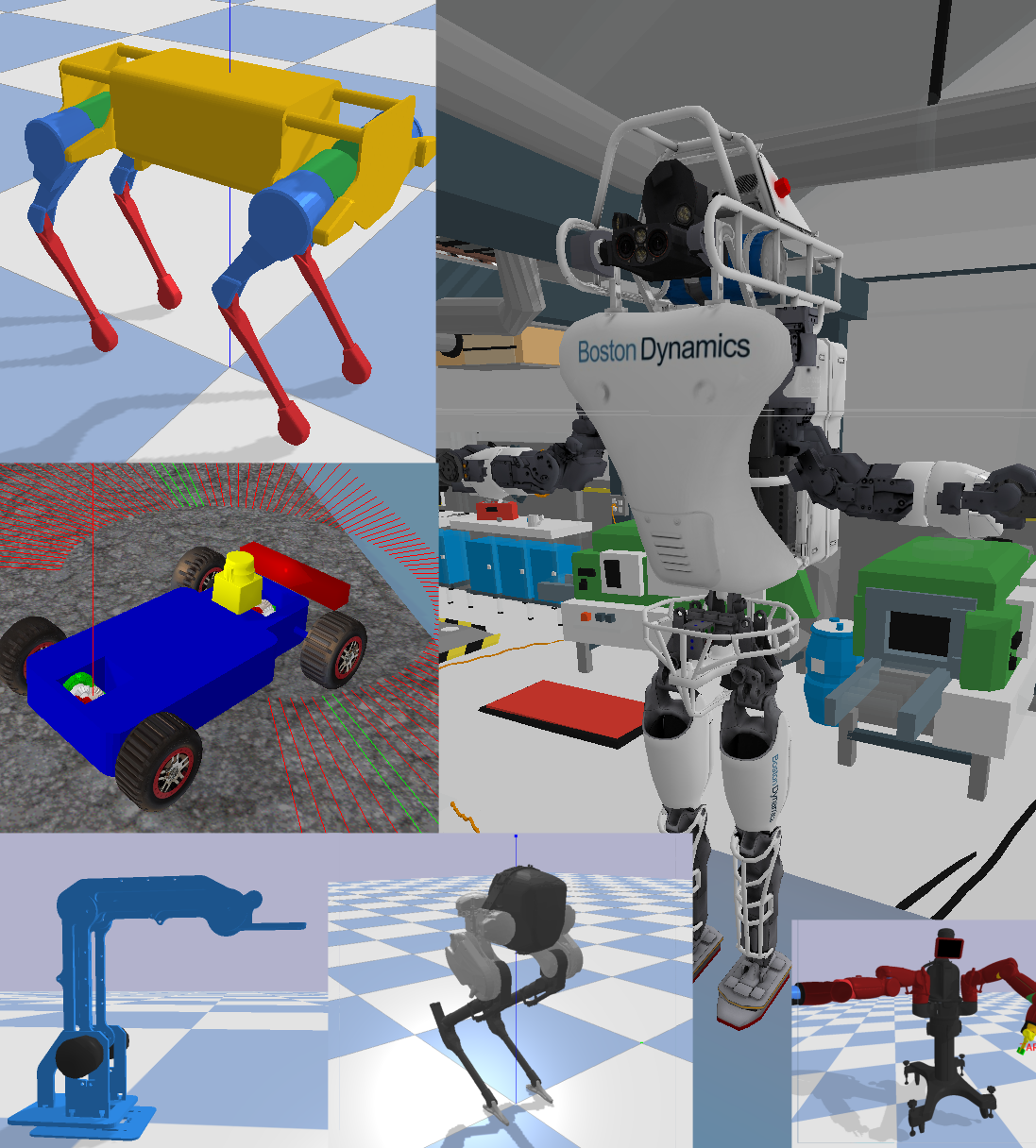
env_name = “AtlasPyBulletEnv-v0”
atlas_v4_with_multisense.urdf
OP3 Soccer
Paper: Learning Agile Soccer Skills for a Bipedal Robot with Deep Reinforcement Learning
RoboCar Gym
Pybullet-RoboCar
Blog:
Creating OpenAI Gym Environments with PyBullet (Part 1)
Creating OpenAI Gym Environments with PyBullet (Part 2)

Quadruped Gym
Motion Imitation
Code: TF 1.15
Code: PyTorch
For Training:
python motion_imitation/run_torch.py --mode train --motion_file 'dog_pace.txt|dog_spin.txt' \
--int_save_freq 10000000 --visualize --num_envs 50 --type_name 'dog_pace'
For Testing:
python motion_imitation/run_torch.py --mode test --motion_file 'dog_pace.txt' --model_file 'file_path' \
--encoder_file 'file_path' --visualize
Rex: an open-source quadruped robot
Code: nicrusso7/rex-gym

Drones Gym
PyBullet-Gym for Drones


- Installation
sudo apt install ffmpeg pip install numpy pillow matplotlib cycler pip install gym pybullet stable_baselines3 ray[rllib] git clone https://github.com/rkuo2000/gym-pybullet-drones.git cd gym-pybullet-drones -
Train & Enjoy
python train.py# modify train.py for different env, algorithm and timesteps
python enjoy.py# modify enjoy.py for different env -
Fly using DSLPIDControl.py:(PID飛行)
python examples/fly.py --num_drones 1

-
To learn take-off:(起飛)
python examples/learn.py

compare.pywhich replays and compare to a trace saved infiles/example_trace.pkl
Experiments
cd experiments/learning
env : hover, takeoff, flythrugate, tune(旋停, 起飛, 穿越, 調整)
algo: a2c, ppo, sac, td3, ddpg
- To learn hover:(旋停)
python singleagent.py --env hover --algo a2c
To visualize the best trained agent:
python test_singleagent.py --exp ./results/save-hover-a2c
For multi-agent RL, using rllib:
python multiagent.py --num_drones 3 --env hover --algo a2c --num_workers 2
Flightmare
Flightmare is a flexible modular quadrotor simulator.

- Introduction
- Prerequisites
- Install Python Packages
- running ROS
roslaunch flightros rotors_gazebo.launch - flighRL
cd /path/to/flightmare/flightrl pip install . cd examples python3 run_drone_control.py --train 1
AirSim

Assistive Gym
Paper: Assistive Gym: A Physics Simulation Framework for Assistive Robotics

-
Four collaborative robots (PR2, Jaco, Baxter, Sawyer)

-
Support for the Stretch and PANDA robots
 |
 |
Code: Healthcare-Robotics/assistive-gym
Assistive VR Gym
Paper: Assistive VR Gym: Interactions with Real People to Improve Virtual Assistive Robots
Code: Healthcare-Robotics/assistive-vr-gym

Learning Dexity
Dexterous Gym


DexPilot
Paper: DexPilot: Vision Based Teleoperation of Dexterous Robotic Hand-Arm System

TriFinger
Paper: TriFinger: An Open-Source Robot for Learning Dexterity



Code: TriFinger Robot Simulation
Multi-Task Reset-Free (MTRF) Learning
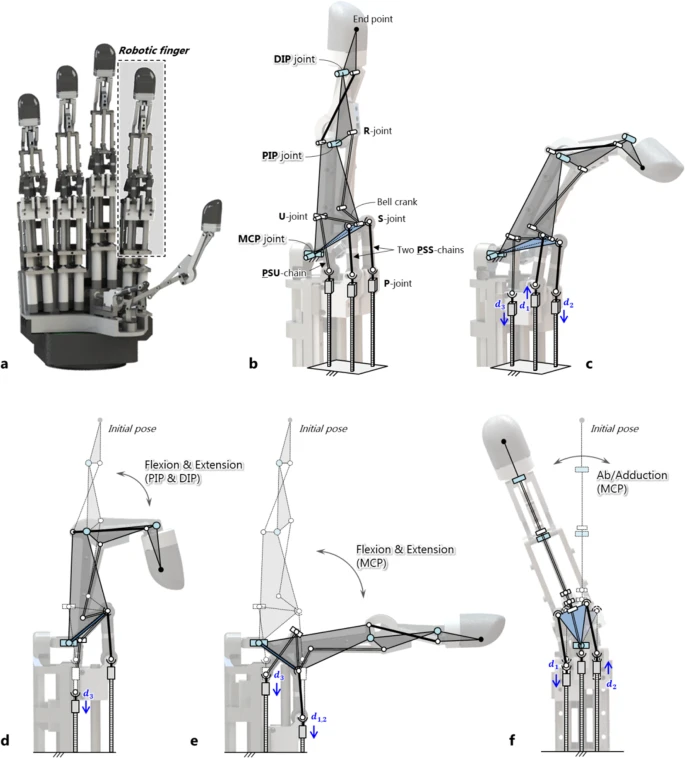
Dexterous Anthropomorphic Robotic Hand
Blog: Robotic hand can crush beer cans and hold eggs without breaking them

Paper: Integrated linkage-driven dexterous anthropomorphic robotic hand
Robotic Telekinesis
Robotic Telekinesis: Learning a Robotic Hand Imitator by Watching Humans on Youtube
Fixed-Finger Gripper
Paper: F1 Hand: A Versatile Fixed-Finger Gripper for Delicate Teleoperation and Autonomous Grasping
Learning Diverse Dexterous Grasps
ViLa
Blog: https://bangqu.com/9Fa2ra.html

Mobile ALOHA
Paper: Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation
Github: https://github.com/MarkFzp/mobile-aloha
Code: https://github.com/MarkFzp/act-plus-plus
ALOHA 2
Paper: ALOHA 2: An Enhanced Low-Cost Hardware for Bimanual Teleoperation
ALOHA unleashed
Paper: ALOHA Unleashed: A Simple Recipe for Robot Dexterity

DemoStart
Paper: DemoStart: Demonstration-led auto-curriculum applied to sim-to-real with multi-fingered robots
Blog: Our latest advances in robot dexterity


ReKep
Paper: ReKep: Spatio-Temporal Reasoning of Relational Keypoint Constraints for Robotic Manipulation
Code: https://github.com/huangwl18/ReKep
This site was last updated September 17, 2025.